Project Coordinator: Prof. Dr. Klaus Werner Schmidt
Project Type: TUBITAK 1001 Scientific and Technological Research Projects Funding Program
Project Budget: 373.910 TL
Project Duration: 36 months
Project Start Date: 01 November 2019
Funded Personnel: 1 PhD Student (Full-Time), 2 MSc Students (Full-Time)
Modern vehicles are considered as automotive Cyber Physical Systems (ACPS) with a strong interaction of the physical vehicle, its sensors and actuators, the communication technology and embedded software. The in-vehicle network is a vital part of an ACPS since it enables the information exchange between the system components such as electronic control units (ECUs). Hence, it must fulfill stringent requirements regarding reliability, timing, efficiency, cost and compatibility.
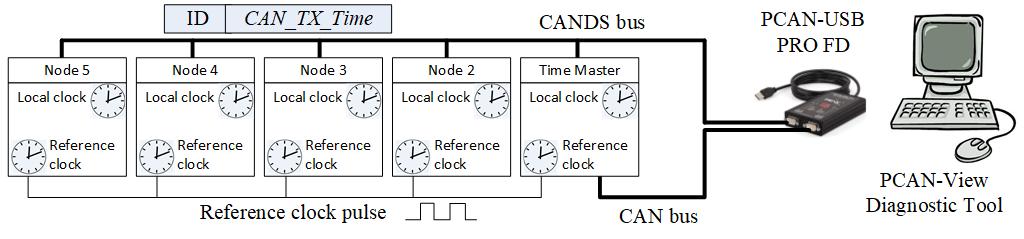
Existing in-vehicle protocols for ACPS address the stated requirements only partially. Accordingly, the subject of this project is the development of formal and systematic methods for the design, implementation and performance analysis of in-vehicle network protocols for ACPS that support the stringent requirements of deterministic real-time applications with periodic signal communication and that are compatible to existing standards. The major contributıons of the project are (1) the development of a general framework CANDS (Controller Area Network with Determinism and Synchronization support) for in-vehicle network protocols based on the novel idea of weak time division multiple access (TDMA); (2) a hierarchy of novel, fault tolerant clock synchronization algorithms with different accuracy levels; (3) the definition of different CANDS protocols with different levels of clock accuracy and implementation complexity that are fully compatible with CAN; (4) the formal modeling and verification of the general protocol operation as well as the specific CANDS protocols; (5) the development of new algorithms for the performance analysis and design of CANDS networks with ECUs of a certain CANDS protocol or for mixed CANDS ECUs; (6) the experimental evaluation of the CANDS framework based on software and hardware implementations of the proposed CANDS protocols.
As the end of the project, CANDS will realize fault-tolerant clock synchronization with different accuracy levels. For the first time, CANDS will employ the idea of weak TDMA for traffic shaping in order to achieve deterministic network access. Since CANDS is fully compatible to the existing CAN standard, it provides a highly reliable, low-cost in-vehicle protocol for modern ACPS.