Proje Kordinatörü: Assoc. Prof. Mustafa Mert Ankaralı
Proje Türü: TUBITAK 1005
Proje Bütçesi: 1.000.000 TL
Proje Süresi: 18 Ay
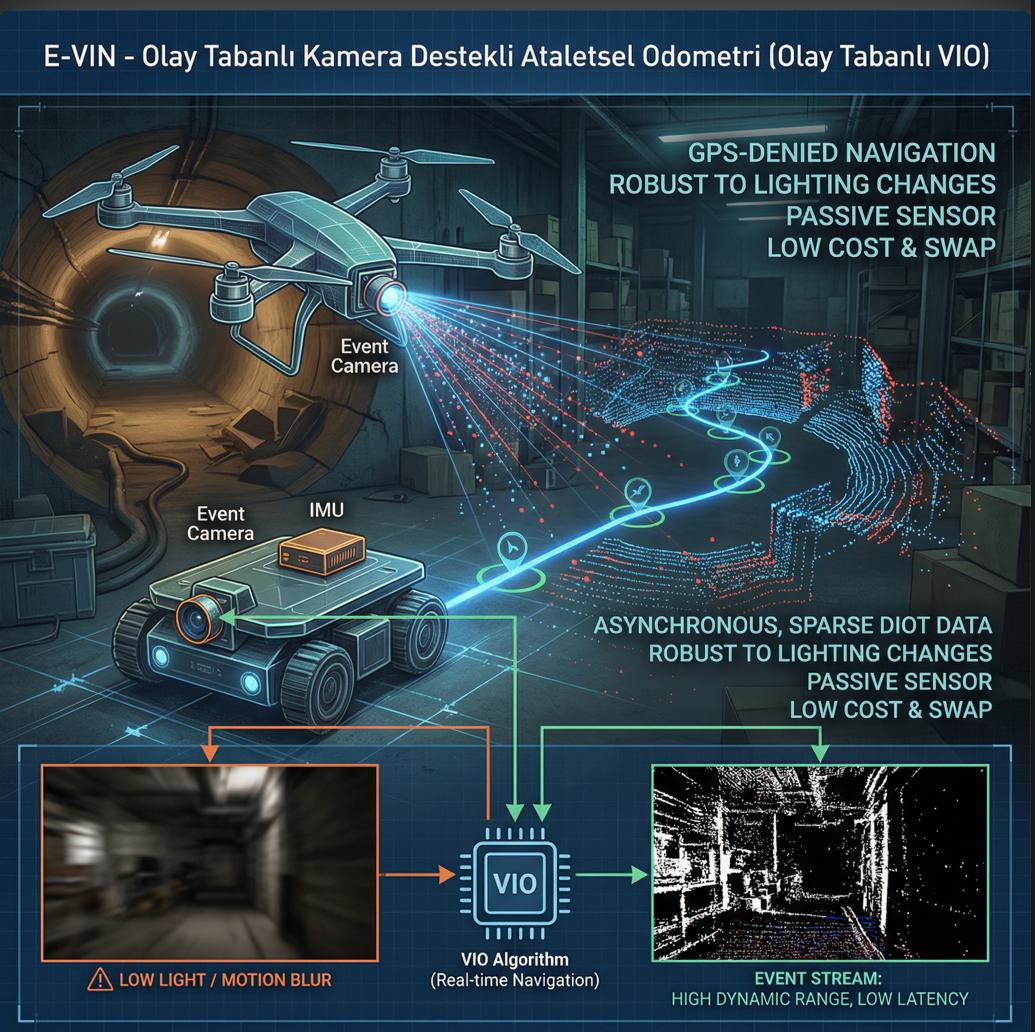
Bu proje, GPS’in kullanılamadığı veya güvenilir olmadığı ortamlarda görev yapan otonom sistemler için olay tabanlı kamera destekli görsel-ataletsel odometri (Event-based VIO) tabanlı yeni nesil bir yerel konumlandırma çözümü geliştirmeyi amaçlamaktadır. Geleneksel RGB kameralar ve LIDAR tabanlı navigasyon sistemleri; düşük ışık koşulları, ani aydınlatma değişimleri, yüksek maliyet, ağırlık ve enerji tüketimi gibi önemli kısıtlar barındırmaktadır. Biyolojik görme mekanizmalarından esinlenen olay tabanlı kameralar ise yalnızca sahnedeki parlaklık değişimlerini zaman damgalı olaylar şeklinde algılayarak, yüksek dinamik aralık, çok düşük gecikme ve devinim bulanıklığına karşı dayanıklılık gibi üstün özellikler sunmaktadır.
Proje kapsamında, olay tabanlı kamera ve IMU verilerinin senkronize edilerek entegre edildiği, gerçek zamanlı çalışabilen özgün bir olay tabanlı VIO algoritması geliştirilecektir. Olay verilerinin anlamlandırılması, sensör kalibrasyonu, veri füzyonu ve konum kestirimi aşamaları hem model tabanlı hem de öğrenme tabanlı yaklaşımlar kullanılarak ele alınacaktır. Geliştirilecek sistemin; düşük ışık, yüksek hızlı hareket ve GPS’siz ortamlarda kararlı ve uzun süreli konum takibi sağlayabilmesi hedeflenmektedir.
Ortaya çıkacak modüler, hafif ve düşük maliyetli navigasyon çözümünün; savunma sanayii, otonom kara ve hava araçları, giyilebilir sistemler ve mobil robotik uygulamalarda kullanılabilecek yüksek katma değerli bir teknoloji sunması beklenmektedir. Proje, olay tabanlı görmenin navigasyon sistemlerine entegrasyonu konusunda literatürdeki önemli bir boşluğu doldurmayı ve ülkemizin bu alandaki teknolojik yetkinliğini artırmayı hedeflemektedir.